
CS562 Project4 Ambient Occlusion
CS562, Fall 2019
November 26th, 2019
Implementations:
Robot Model Source:
Author : kurojishi
AO Calculating:
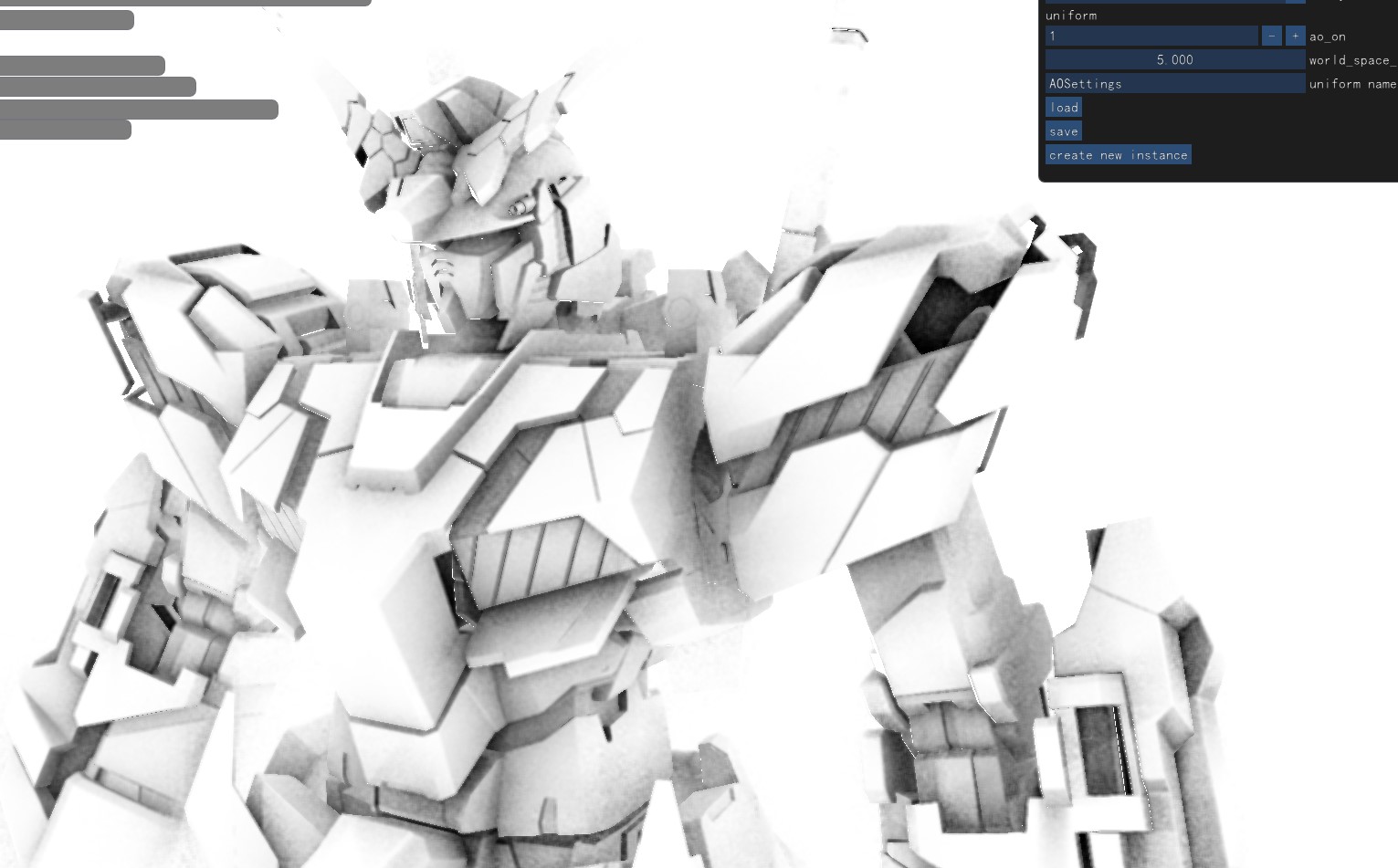
For this part, I simply followed instructions in handout paper and wrote a fill-screen rect pass, which takes scene depth and normal texture as input and draw ambient occlusion coefficients on a RGBA8 texture. I choose 20 points to integrate final result for each pixel. For the scale and contrast factors s and k, I simply use ones.
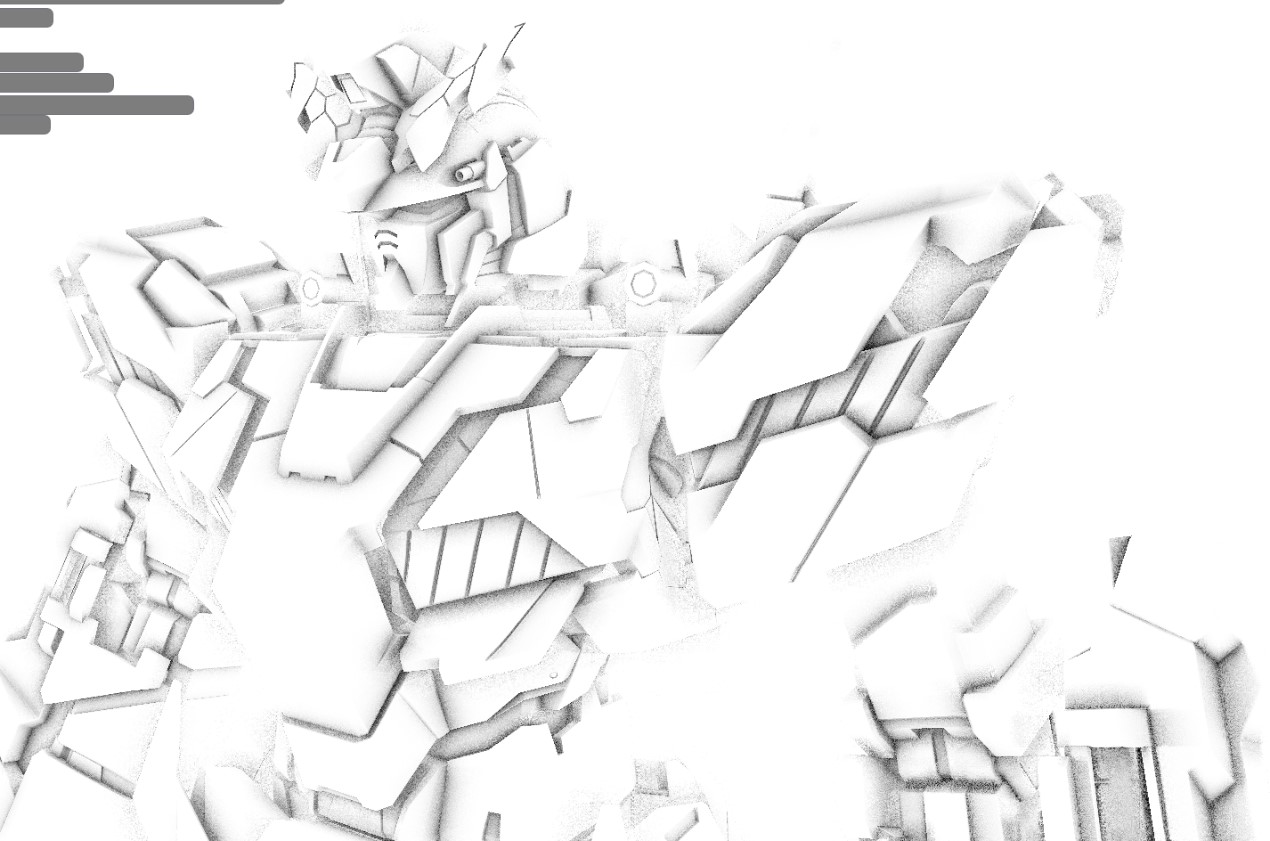
AO calculation result with visible noises, AO radius is 1
Blur Implementation:
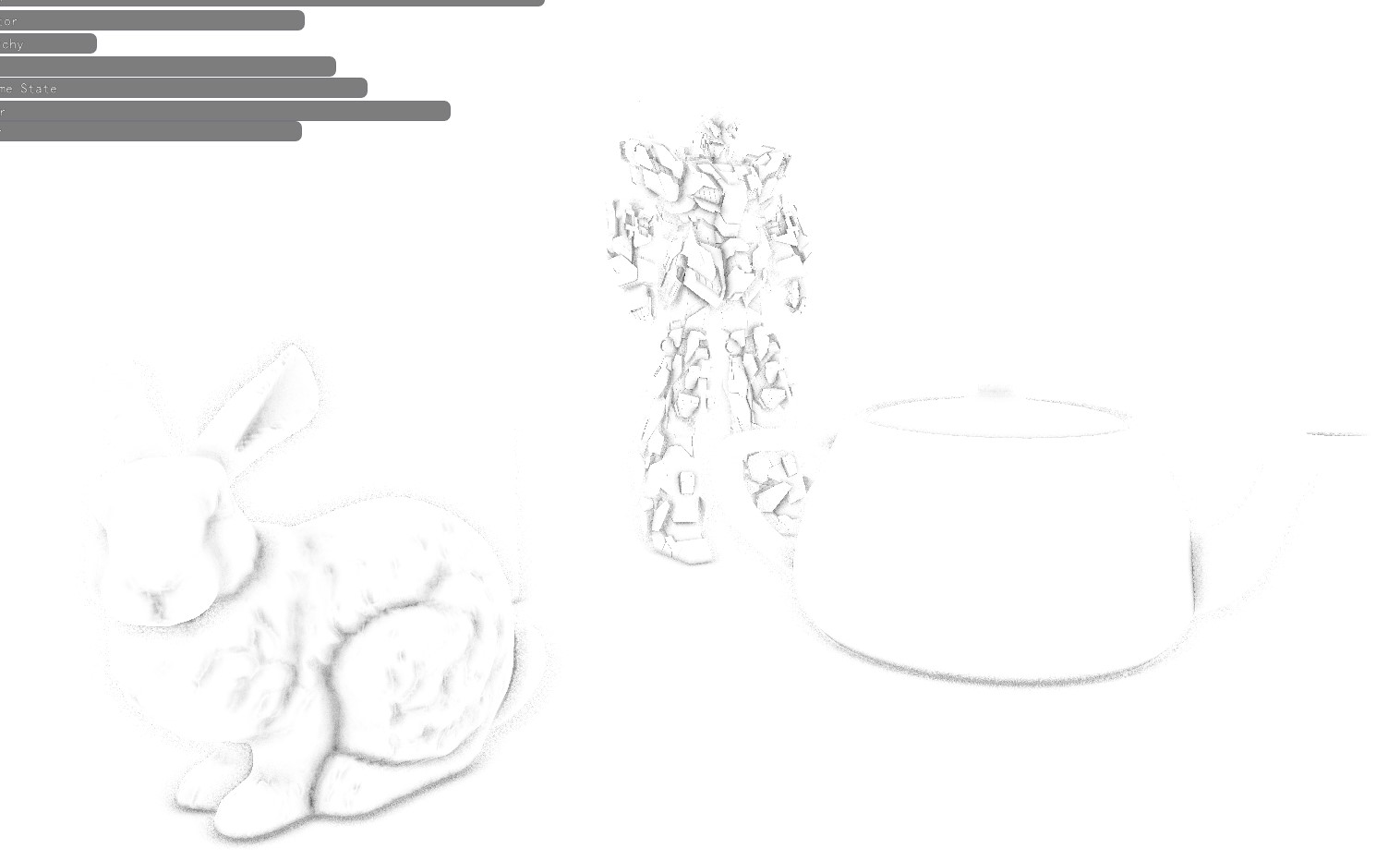
According to the handout paper, Bilateral filter cannot be divided into vertical and horizontal parts, so I instead implement filter in another fill-screen graphics render pass. In the fragment shader, I choose 5 as the window size of filter and doing both spatial and range weight calculation in a 5x5 for loop.
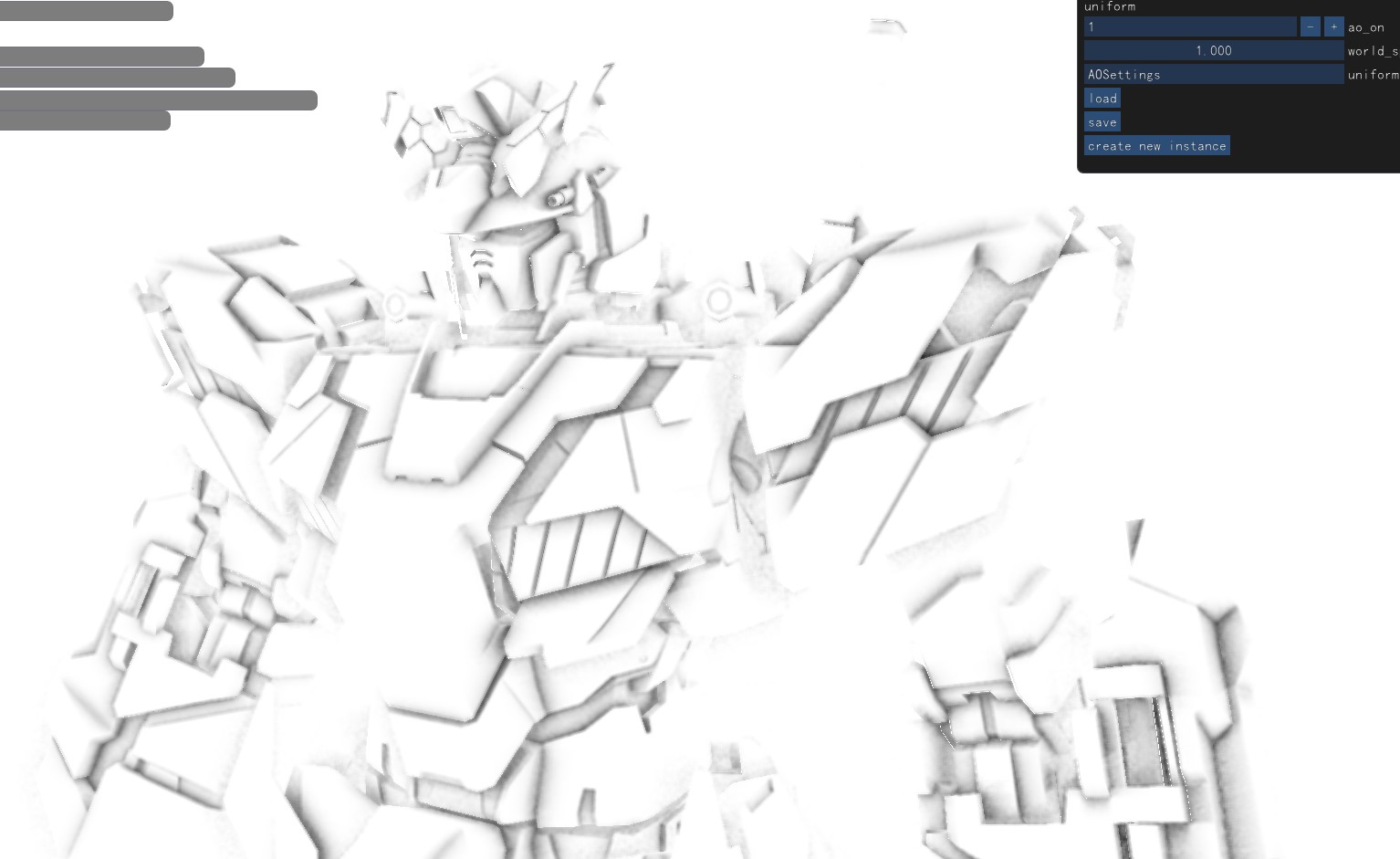
5x5 bilateral filtered result, looks smoother. For some parts the noise is still visible but blurred
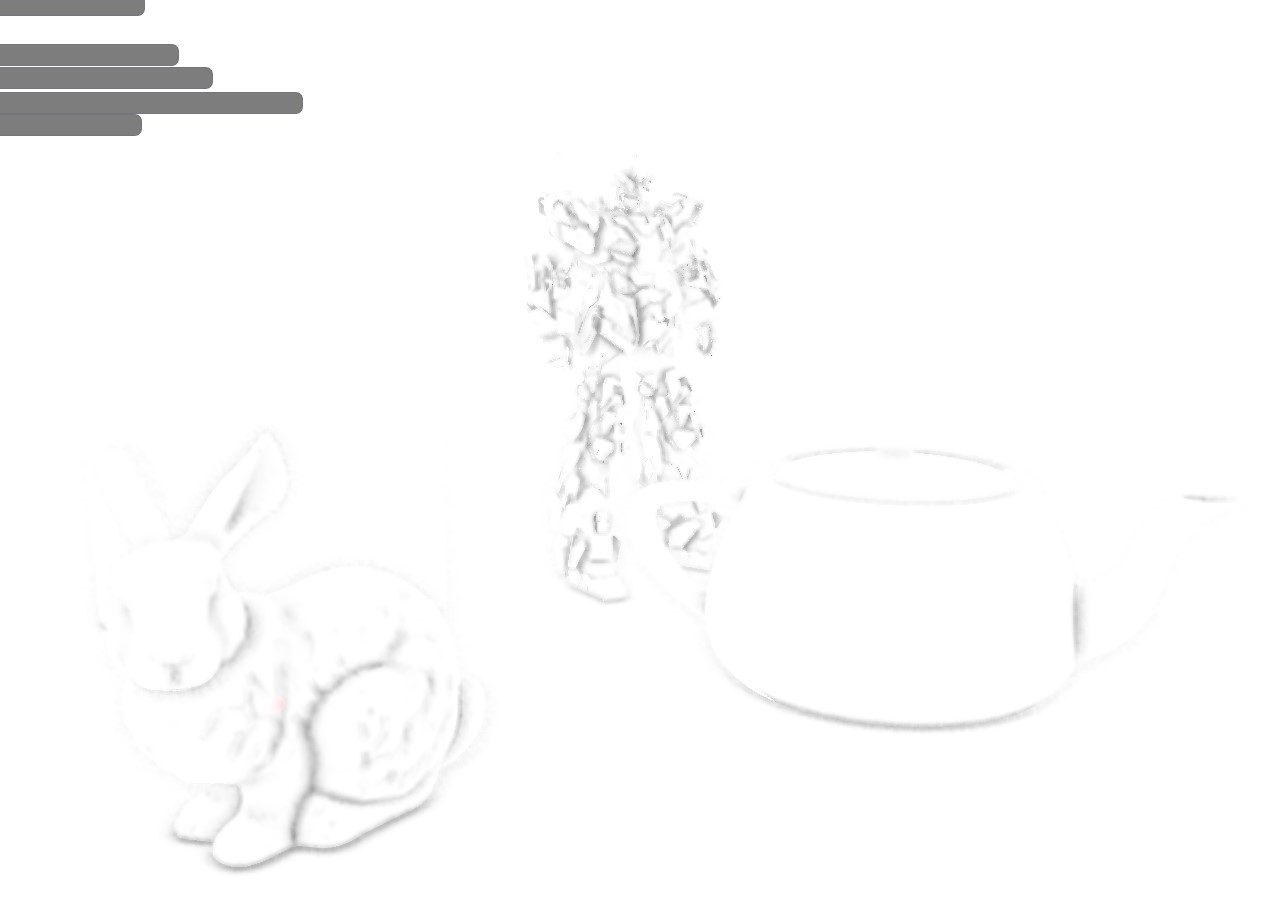
Try different AO radius:
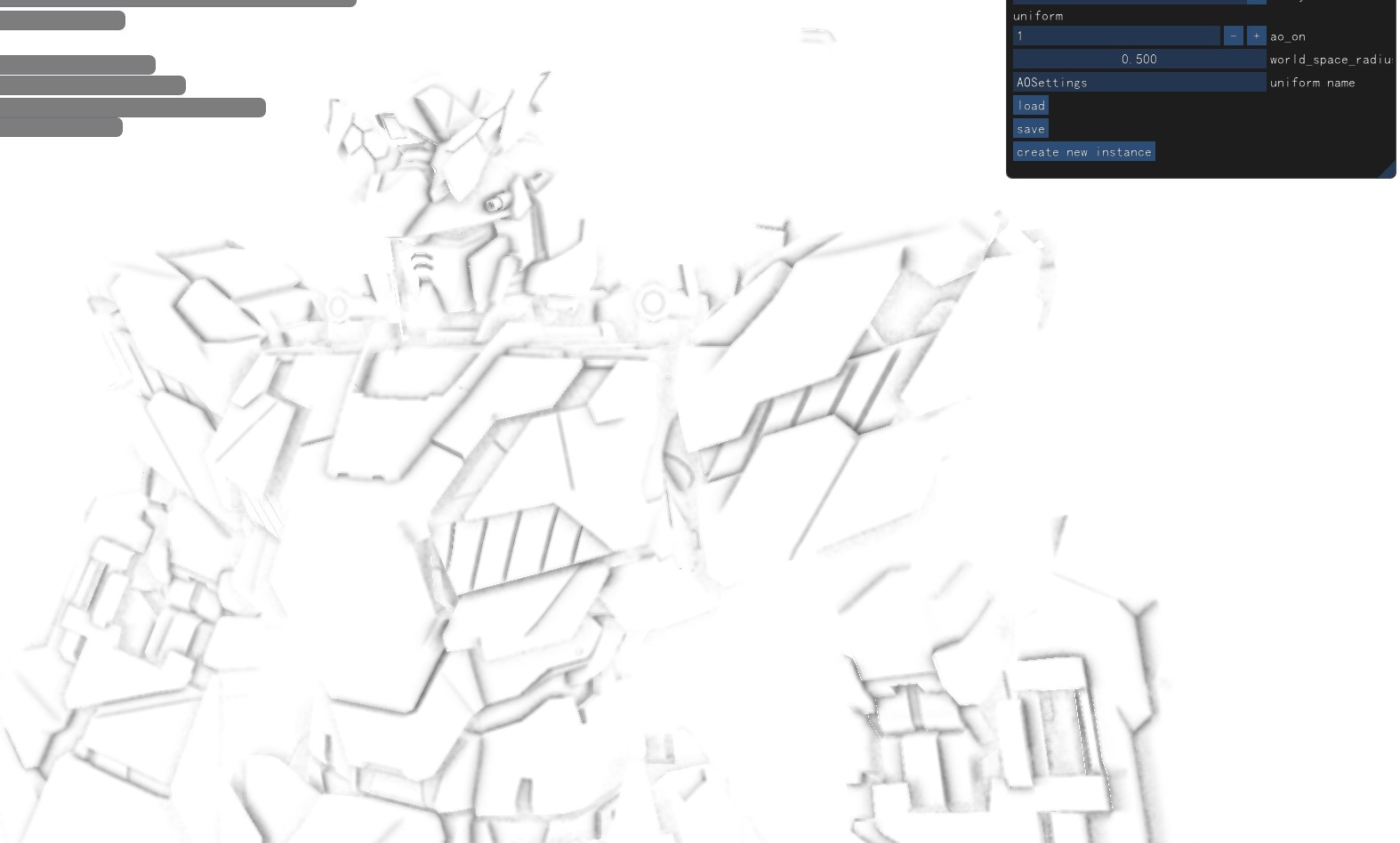
Radius = 0.5
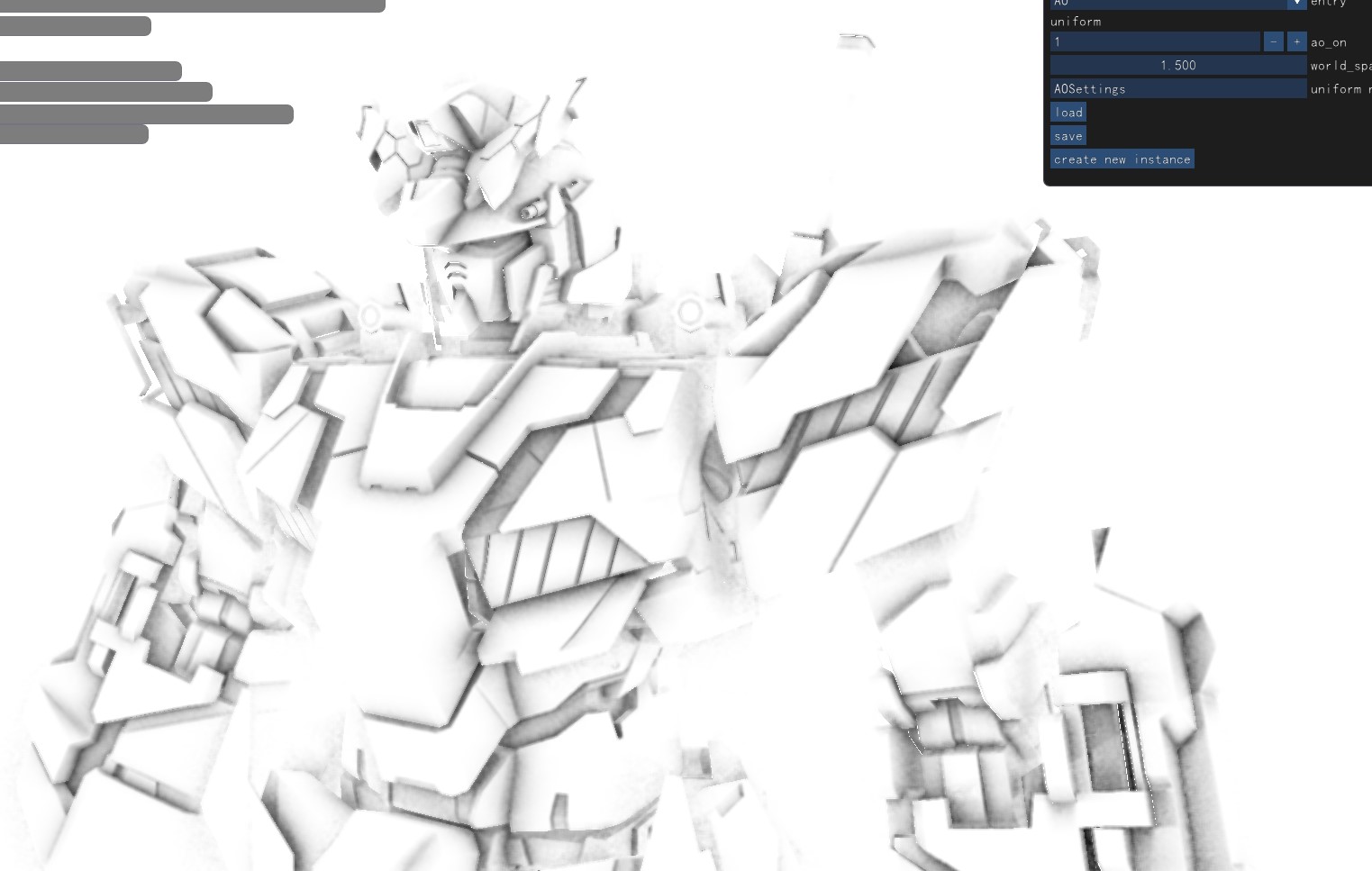
Radius = 1.5
Radius = 5.0
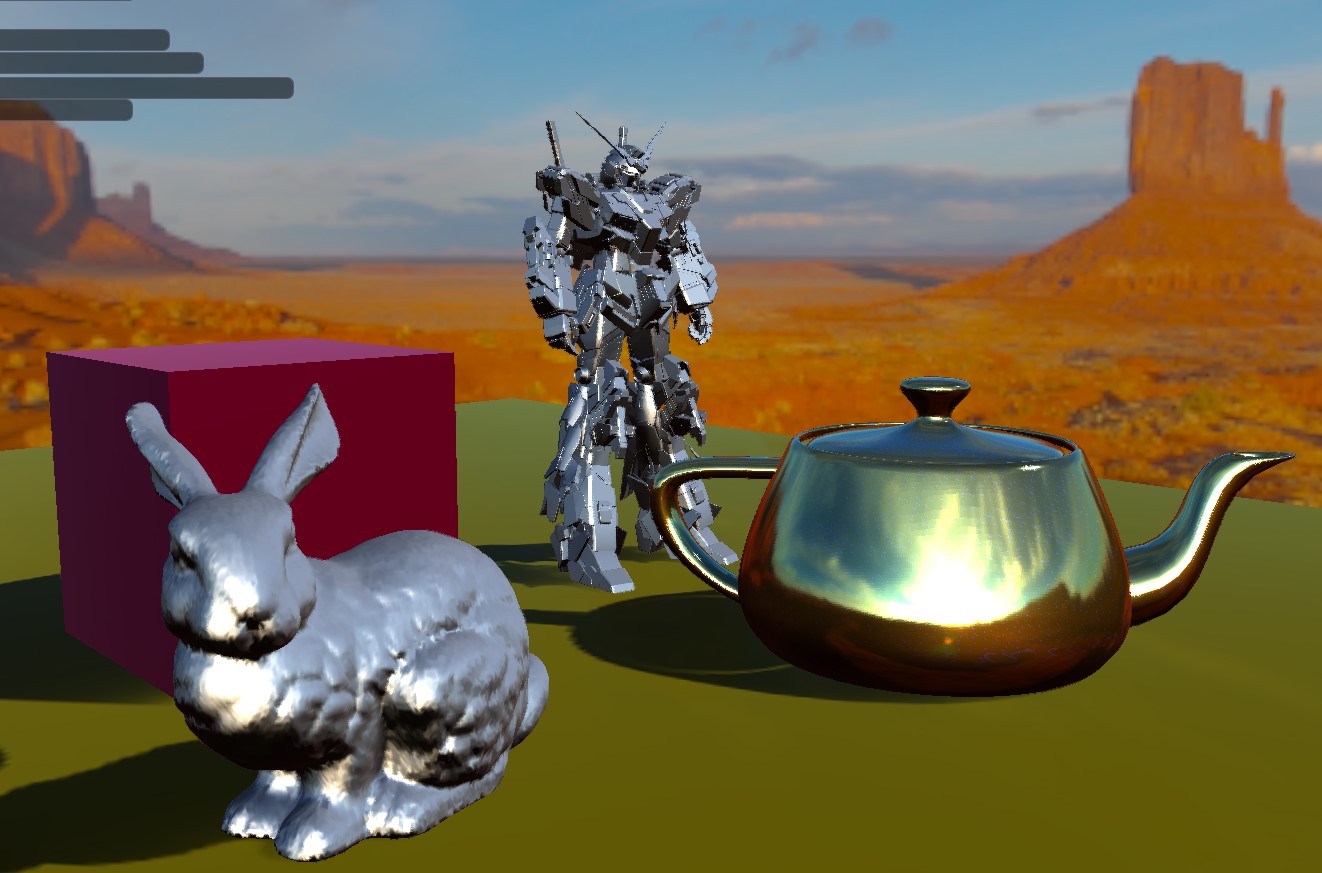
Results
View 1(Same as previous screen shots):

Without AO

AO Radius = 2

AO Radius = 5
View 2:
Not Filtered
Filtered
Without AO
AO Radius = 2

AO Radius = 5